Рука-робот с мини сервоприводом
Недавно я сделал руку-робота, а сейчас я решил добавить к нему захватывающее устройство, работающее на мини сервоприводе. Я решил сделать два варианта, чтобы посмотреть, как он будет лучше работать с прямой или круглой шестеренкой. Мне понравился больше вариант с круглой шестерней, так как его изготовление заняло всего 2 часа, и зазор между шестернями был совсем небольшим.
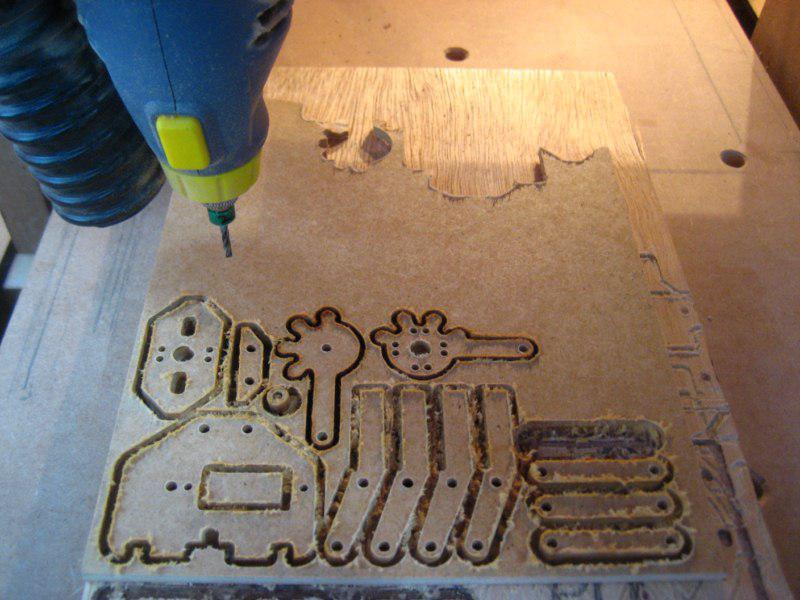
Сначала я вырезал детали на фрезерном станке:
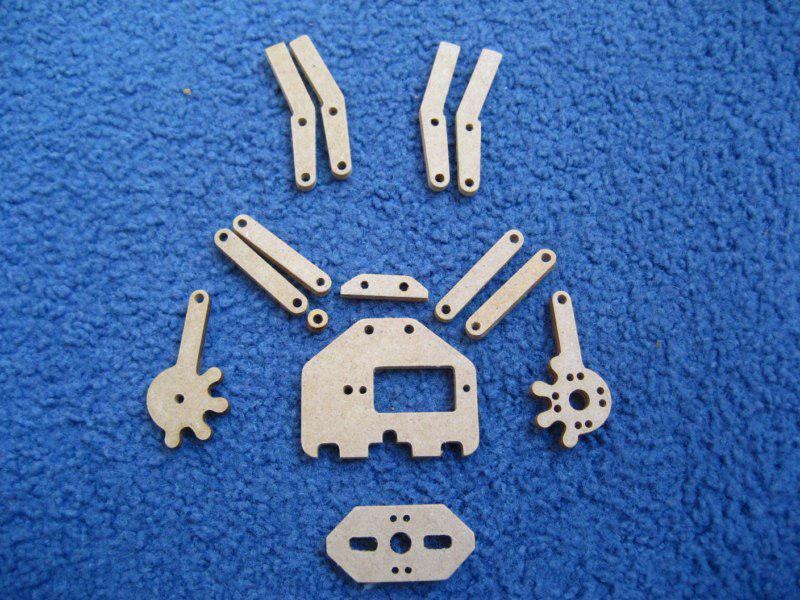

Я собрал детали с помощью шурупов 2x10 мм.


А вот как мини-сервопривод присоединяется к захватывающему устройству:
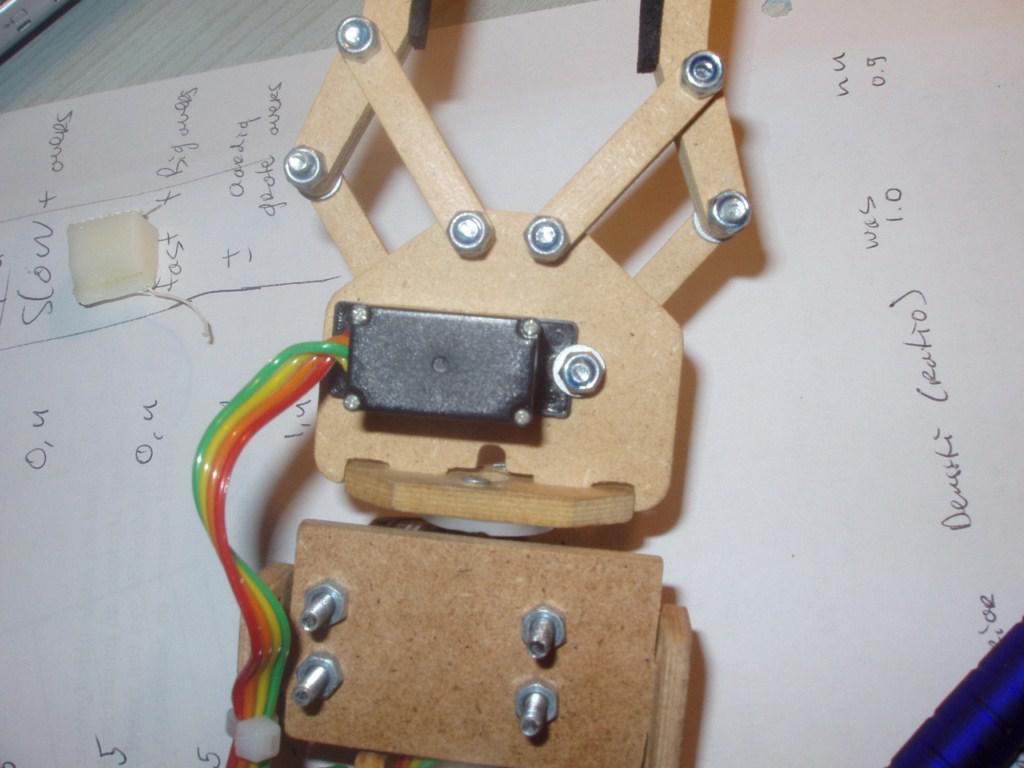
Как работает захватывающее устройство с сервоприводом:
И вот теперь, когда все собрано и механическая часть тоже практически готова, мне осталось только доделать электронную часть работы! Я выбрал Arduino для контроля моего робота, и сделал схему (она справа) для соединения Arduino с сервоприводом.
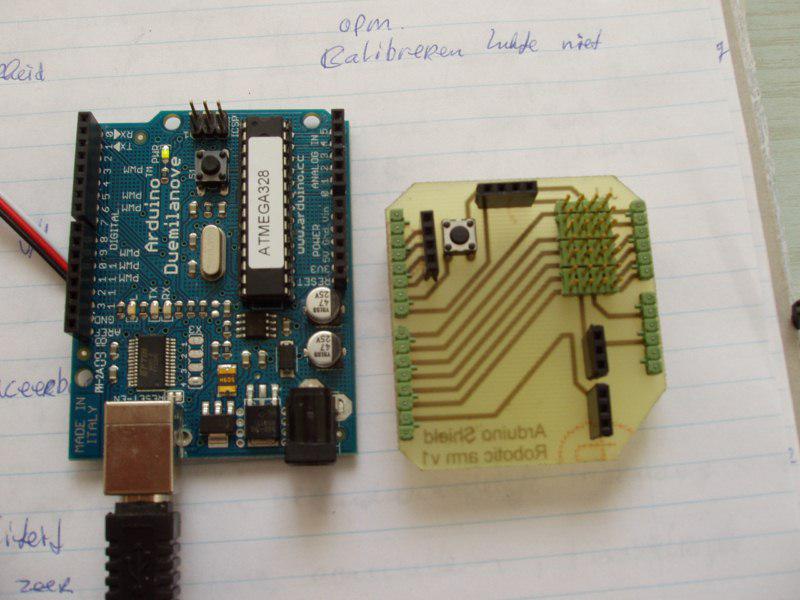
Схема на самом деле очень проста, она просто дает сигналы на Arduino и обратно. Существует также разъем для инфракрасного приемника и некоторые разъемы для источника питания и 4-х подключений к остальным (неиспользованным) контактам Arduino. Таким образом, можно подключить еще один выключатель или датчик.
А вот как рука-манипулятор двигается:
НАПИСАТЬ КОММЕНТАРИЙ
-

Хомяк растёт, а колесо подходящего размера в магазине не продаётся, было решено сделать бОльшое колесо из картона. Теперь у Хомы есть прекрасный тренажёр.
Дмитрий ДА 28.01.2011 -
 Необычный блокнот может получиться из привычных нам сыпучих пищевых продуктов!!!Yuseka 14.12.2009
Необычный блокнот может получиться из привычных нам сыпучих пищевых продуктов!!!Yuseka 14.12.2009 -














