Робот-пылесос своими руками
Эта статья о том, как я собираю свой робот-пылесос. Здесь много фото и видео для тех, кто тоже горит такой идеей.
19 декабря 2014. Интересоваться роботами-пылесосами я начал пять лет назад в 2009 году, наверное после знакомства с Робофорумом. Все эти годы были попытки что-то начать, но так ничего и не было сделано. Пару месяцев назад я активно читал статьи про робот-пылесос и решил окончательно что куплю Керхер RC 4.000. Прошло время, жена часто стала убираться в кухне и в коридоре, меня это начало раздражать, мысль о роботе всё крепчала. Пару вечеров я опять провёл в картинках и форумах о роботах-пылесосах. Наконец решил, что сделаю робота сам!
Цель создать робот-пылесос не хуже промышленно-изготовленного и избавиться от слоя пыли и мелкого мусора в доме. В процессе изучения устройства роботов выяснилось, что они очень шумные, около 60 дБ, в то время как стационарный домашний моющий пылесос шумит около 80 дБ. Мой самодельный робот должен работать максимально тихо, его габариты не должны превышать габаритов заводских роботов и он должен убирать быстро и качественно.
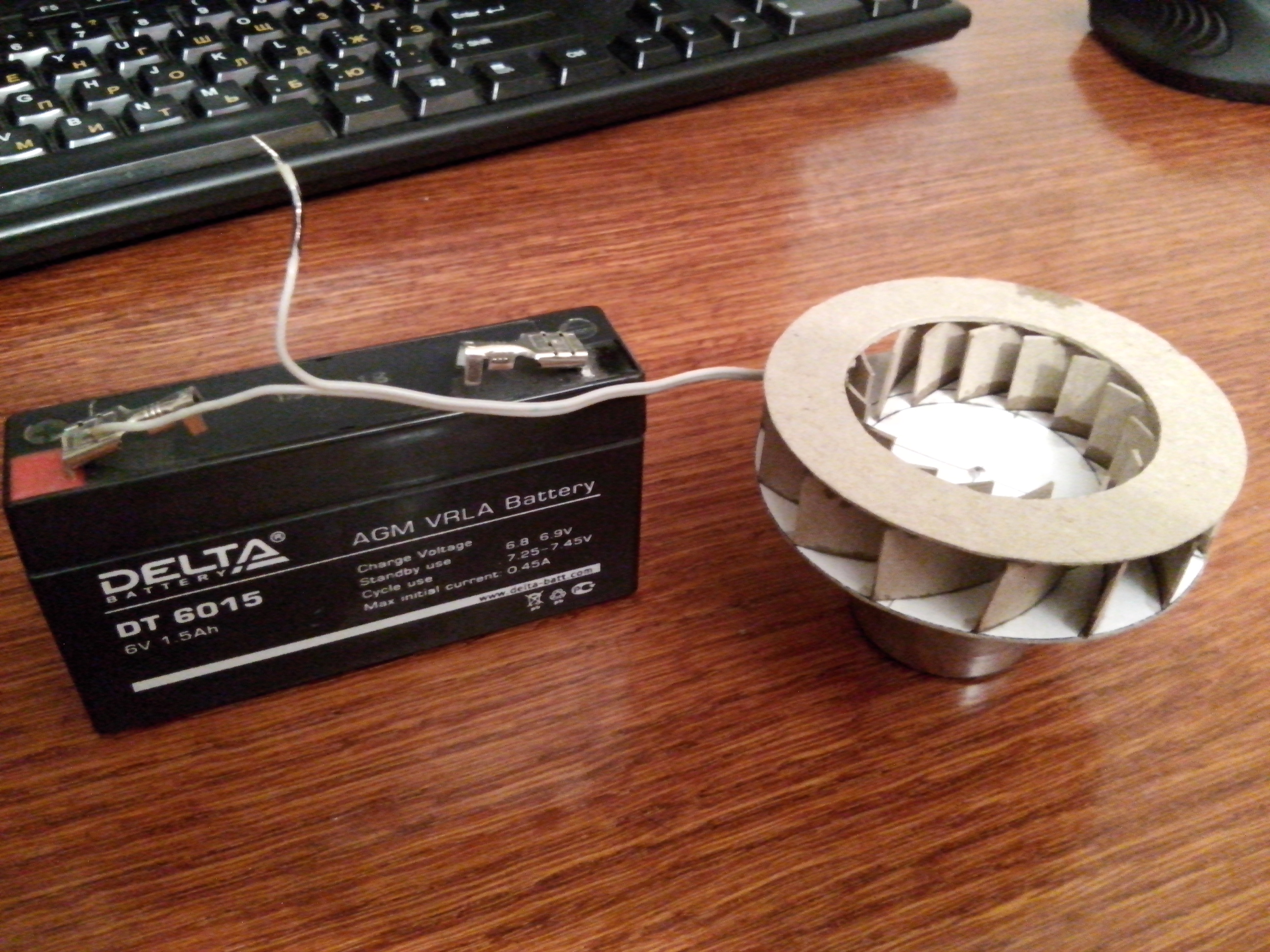
Первым делом надо было решить вопрос со всасывающей турбиной. У меня уже был опыт построения турбин, но все они работали плохо. Для гаража я сделал самодельный пылесос из турбины от старого пылесоса "Ракета". Для робота нужна маленькая турбина, поэтому я начал поиски сначала. Совершенно случайно нашёл на Робофоруме сообщения пользователя Vovan, он поделился чертежом своей турбинки. Не долго мысля я перечертил чертёж и склеил свою турбину.
Скачать чертёж турбины для пылесоса (dwg)
Турбину я вырезал и склеил из плотного картона при помощи супер-клея за 20 минут. Первые испытания прошли успешно!

20 декабря 2014. Купил сегодня пиллинг для тела :) вобщем-то мне нужна только прозрачная банка с закручивающейся крышкой, содержимое отдал жене. Также купил щетку для одежды с жёстким ворсом, разобрал её, завтра сделаю из неё щётку для своего робота.

В Автокаде сделал наброски расположения элементов в корпусе. Остановился на размерах тазика диаметром 25 см и высотой около 9 см. Пока не понятно влезут ли все элементы, места реально мало, но делать корпус больше не хочется. Поставил сам для себя рамки :)
Вчера в Интернете выписал размеры заводских роботов-пылесосов:
диаметр * высота (см)
36 * 9
32 * 8
32 * 10
30 * 5
22 * 8
Я задумал сделать свой пылесос с циклонным фильтром, поэтому высоту маленькой не сделаешь, её определяет банка для сбора мусора, а вот в диаметре можно выиграть. За циклон конечно спасибо Дайсону, давно пересматриваю его изобретения и даже гаражный пылесос сделал по принципу циклона. Мой фильтр будет простым, без всяких конусов и бешеной мощности всасывания, для первого раза сойдёт.
21 декабря 2014. От половой щётки в гараже отпилил 15 см круглого черенка и сделал из него круглую щётку. Диаметр получился около 70 мм. Размер нереально большой и очень жесткая щетина, не знаю как она себя поведёт, но наверное придётся или переделывать или утяжелять пылесос, потому что щетина будет его подкидывать. Щетину просто вставлял в отверстия без клея, получилось надёжно. Всю конструкцию закрепил на шпильке диаметром 6 мм и по краям два подшипника.
Нашёл в гараже два колеса, не поверите, от пылесоса! Тот самый ручной пылесос в котором не было ничего электрического, только 4 колеса и две щётки приводимые в движение этими колесами. Колёса ждали своего часа около 15 лет :)
Сейчас в Автокаде сделаю очередной чертёж для нескольких деталей, завтра всё вырежу из фанеры и попробую что-нибудь собрать уже на основе.
22 декабря 2014. Очень хочется сделать робот-пылесос своими руками и закончить его до нового года 2015. Вчера ночью на Ютубе посмотрел снова несколько роликов про роботов-пылесосов и в частности два ролика про Дайсон 360 Eye и Fluffy:
После первого видео с роботом Дайсона я понял, что делая своего робота диаметром 25 см и щётку длиной 15 см я буду оставлять грязные места вдоль плинтуса на ширину 5 см. После второго видео мозг вообще перезагрузился и подумал не сделать ли щётку впереди робота?! Что буду делать дальше пока не знаю, тесты покажут.
Итак, сегодня купил новый совок и две щётки с более мягкой щетиной. Совок купил из-за резинки, которая приклеена по краю, она прекрасно подойдёт для моей конструкции.

Геометрию корпуса немного изменил исходя из новых мыслей и новой щётки. Размер робота по прежнему 25 см, но теперь это половина круга и половина квадрата. Ширина щётки 21 см, диаметр около 6 см. Выпилил основание из фанеры 8 мм, прикрепил колёса и щетку, завтра сделаю редуктор и попробую что-нибудь подмести :)

23 декабря 2014. Прикрутил к щётке шестерню и рядом прикрепил редуктор, в качестве пассика использовал резинку для денег, для теста прикрутил шурупом мотор. Ниже на видео тест на 6-ти и 9-ти вольтах.
Скорее всего щётку снова переделаю, слишком короткий ворс и слишком жёстко. Ворс должен быть без пропусков, потому что остаются полосы грязи. В целом зрелищно получилось :)
Прикинул хватит ли мне места на три мотора в корпусе. Два мотора будут крутить два колеса и один щётку. Плюс ко всему много места займут редукторы. Пришла идея заменить шестерёночные редукторы на червячный, может быть сделаю пару тестов.

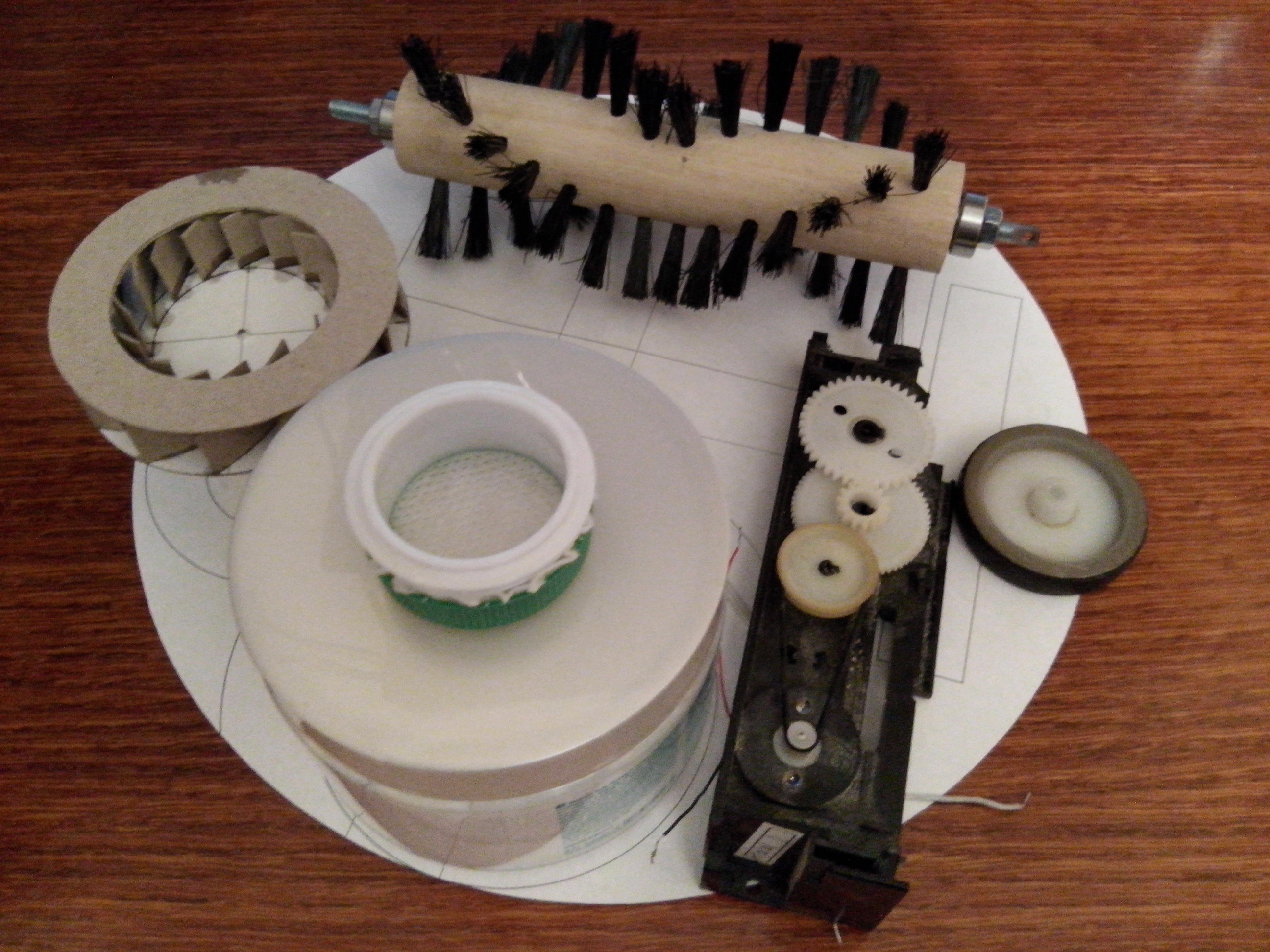
Всасывающую турбину покрыл два раза слоем эпоксидной смолы, стала как пластиковая. Картон больше не гнётся и если попадёт вода всё будет хорошо. Центрировать не пришлось, крутится идеально. Между тем готовлю основу для мусоросборной банки. Сделал фильтр тонкой очистки из горлышка и крышки от бутылки из под кефира. В качестве фильтрующей ткани взял одноразовый мешок от пылесоса. Пока всё клеится, через пару дней прикручу на основу и снова всё протестирую.

На протяжении работы над роботом постоянно приходит в голову мысль обзавестись 3D-принтером. С трёхмерным принтером было бы куда проще создавать такие детали как мне нужно и с высокой точностью. Когда дрелью сверлишь фанеру сверло может увести или наклон не точно 90 градусов, тут о высокой точности можно только мечтать. К тому же детали из фанеры очень громоздкие, на 3D-принтере всё было бы аккуратненько.
24 декабря 2014. С утра протестировал турбину и банку для сбора мусора, днём повторил эксперимент с более высоким напряжением. Результаты не впечатляют. Фильтр тонкой очистки пришлось пока открутить, потому как через него мощность сильно падает. В банке мусор крутится очень эффектно, но реально мощности всасывания не хватает.
Тест турбины с высоким напряжением.
В эти моменты появилось желание на всё забить, зачем я вообще за это взялся. Сейчас очень легко всё бросить и забыть - так проще всего.
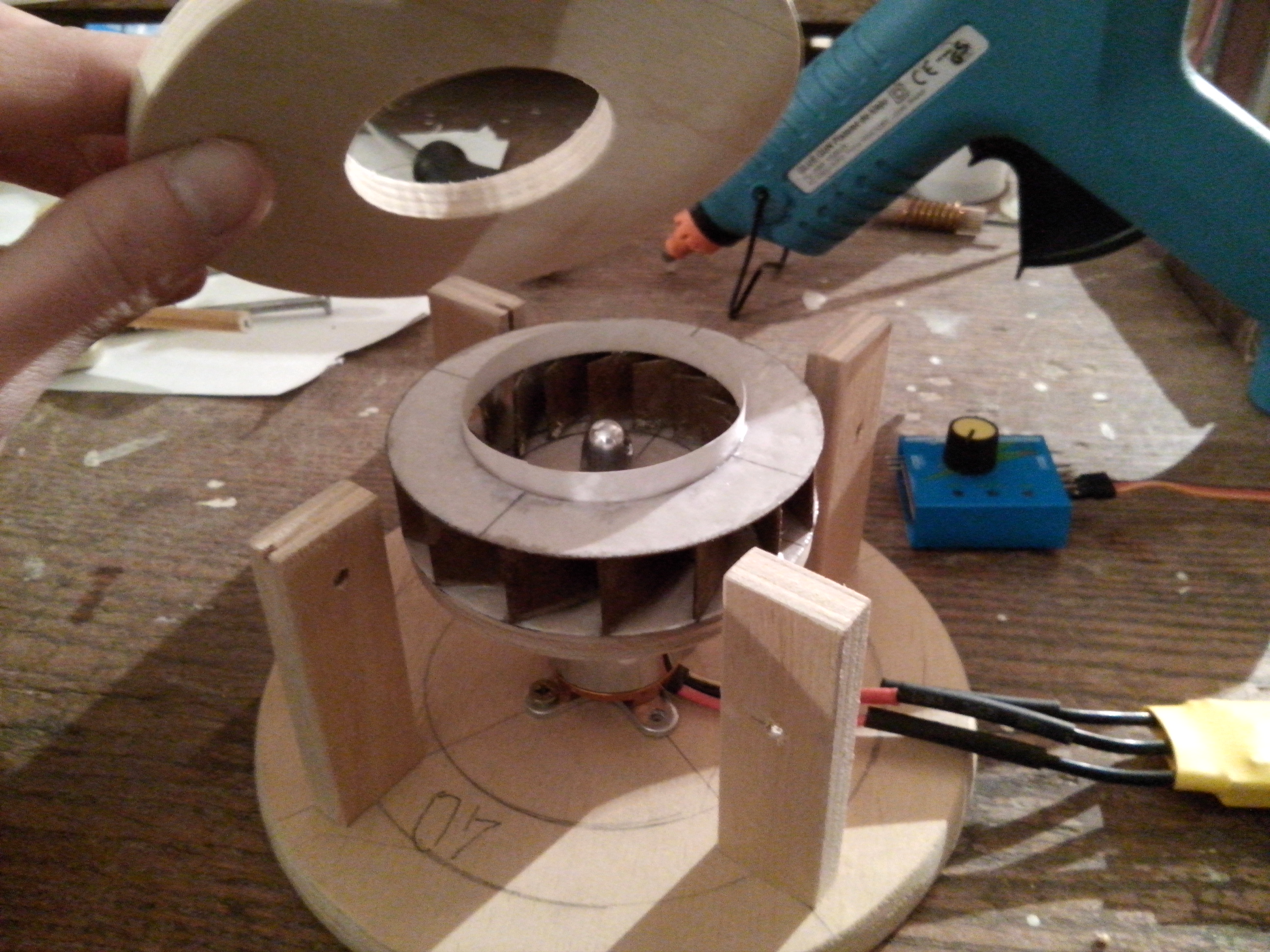
Вечером взял бесколлекторный мотор и начал клеить для него новую турбину по тем же чертежам.
25 декабря 2014. Доклеил вторую турбину для бесколлекторного мотора, хотел протестировать, оказалось мотор вращается не в ту сторону. Завтра пойду в гараж перепаивать провода, а пока всё отложил в сторонку.
26 декабря 2014. Перепаял провода между контроллером и двигателем, получил вращение в нужном направлении. Турбина начала работать, но пару тестов на коленке получились снова печальными. Может быть даже переделаю конструкцию турбины, добавив немного конусности, но об этом позже.
Последние два дня очень мало уделил времени разработкам, постараюсь завтра выделить 4-5 часов.
27 декабря 2014. Решил попробовать собрать червячную передачу для ходовой части робота-пылесоса. На фотках ранее я показывал, что сделать червяка можно из гвоздя и отрезка медной проволоки. Проблема оказалась в процессе припаивания проволоки к гвоздю. Паяльник у меня не очень мощный, поэтому дополнительно гвоздь прогревал на газовой горелке. Однако качественно припаять проволоку так и не получилось, поэтому взял круглый кусок деревяшки и намотал на него проволоку, витки пролил супер-клеем. Червяк получился вполне сносный. Не обращая внимания на овальность деревянной основы и вообще всего блока из фанеры механизм работал нормально, но блин очень медленно.
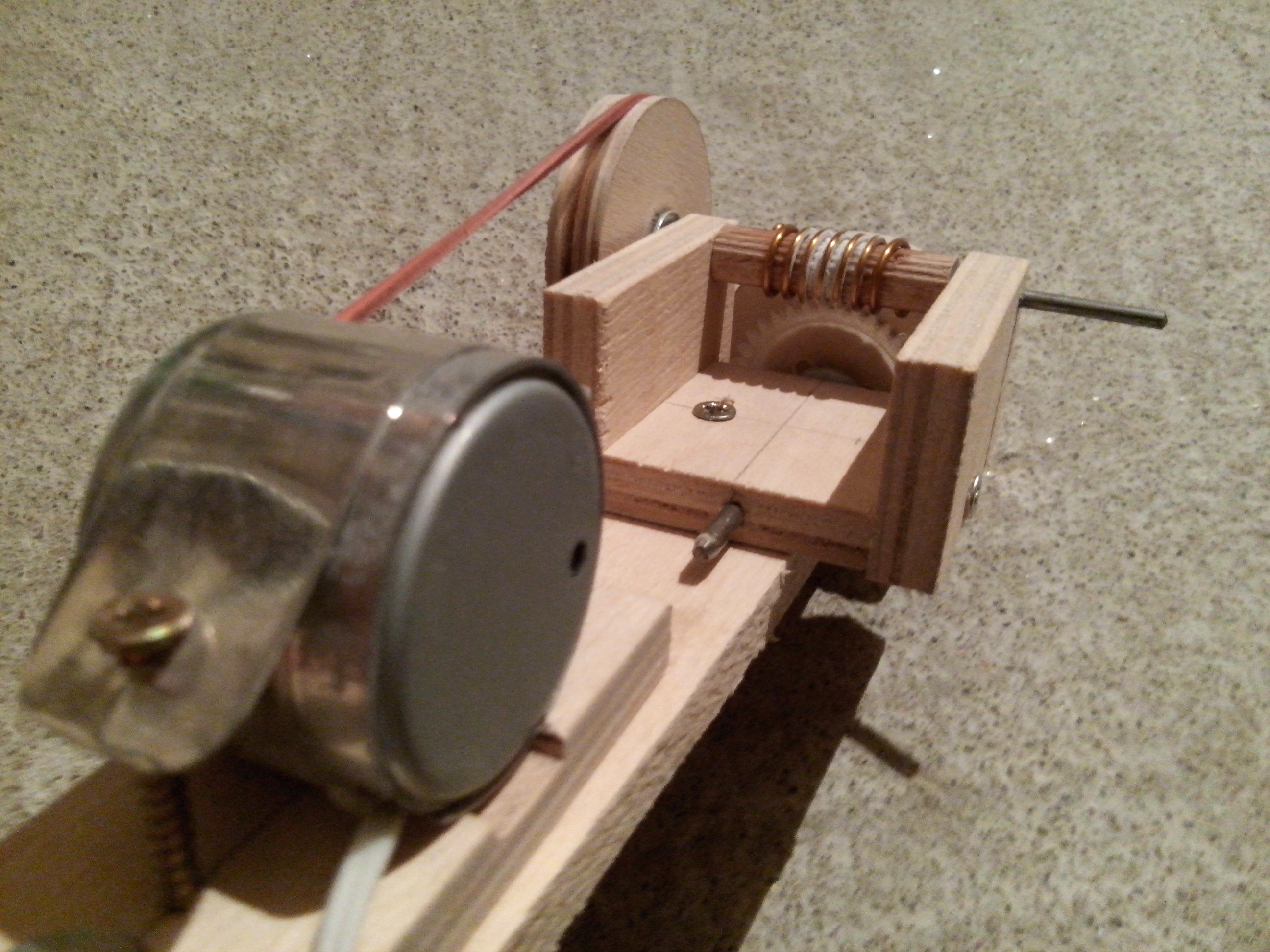
Было бы неплохо раздобыть готовые пластиковые червячные передачи, а пока отложим это всторонку.
Касаемо будущего потребления энергии моим роботом. Сейчас загвоздка с турбиной, что-то не хочет она сосать как положено даже при снятом фильтре тонкой очистки. Если для турбины использовать обычный коллекторный мотор и питать его напряжением в 12 вольт, то потреблять он будет около 0.6 ампера. Если использовать бесколекторный мотор, то он будет потреблять около одного ампера. Плюс для движения робота будет использовано два колекторых мотора и для щётки ещё один, каждый будет потреблять около 0.3 ампера. Электроника будет тоже что-то потреблять. Итого робот будет "кушать" примерно от 1.6 до 2 ампер, в пиках наверное до 2.5 ампер. Не знаю много это или нет, вроде как промышленные роботы потребляют три и более ампер.
Снова пересмотрел кучу видео и фото по запросу "принцип работы робота-пылесоса". Нашел классную фотку турбины от обычного бытового пылесоса. Прочитал на каком-то форуме, что чем длинее лопасти турбины, тем больший вакуум она может создать за счёт центробежной силы.

28 декабря 2014. Склеил сегодня ещё две турбины, отличаются только толщиной. Лопасти сделал как можно длинее. На фото ниже первая тонкая (5мм высота лопасти) турбина, в работе она очень тихая, но нифига не сосёт :)
Вторая турбина толще (15мм высота лопасти).
Ещё раз в гараже попробовал потаскать щетку по полу, мотор часто затыкается от нагрузки, щетина всё равно получилась очень жесткой, да и диаметр щётки не мешало бы уменьшить. Завтра при любой погоде иду покупать щетку с самой мягкой щетиной, также зайду в магазин с игрушками поищу машинки с червячным редуктором для ходовой части робота.
В гараже протестировал новую турбину с напряжением 12 вольт, подумал что 9 лопастей возможно мало. Дома склеил третью за день турбину с длинными лопастями и количеством 15 штук, фото прилагаю:

Закончился ещё один день. До нового года сделать пылесос уже не успею как планировал, однако хочется верить что всё будет хорошо :)
29 декабря 2014. Пошел сегодня в магазин с игрушками в поисках червячной передачи. По дороге вспомнил про игрушку дочери - конь. Этот конь дочери не очень нравился да и вобщем-то и мне он не очень:) Но зато у него внутри целых два червяка и 4+4 шестерни.


В магазин игрушек я всё таки заглянул, потом во второй и купил там машинку-перевёртыш. Машинку купил не столько за механизм, сколько за её колёса, они взбираются на любые поверхности. Внутри у машинки червячной передачи не оказалось. Колёса вполне возможно я использую для самодельного робота, а пока машинку отдал дочери - она в восторге :)

Днём пришла в голову мысль сделать робот-электровеник, т.е. конструкция та же что и сейчас, только отсутствует турбина, мусор просто собирается в отсек. Когда в магазине искал новую щетку с более мягким ворсом (её так и не купил) случайно увидел это:

Эту крышку я разумеется сразу купил. Это уже готовый корпус робота, по современному прозрачный и даже нет лишних элементов. А на самом деле это "Крышка для микроволновой печи" (диаметр 24.5 см), что ей накрывать и зачем не знаю, но робот должен получиться красивый :) Но об этом уже в другой статье.
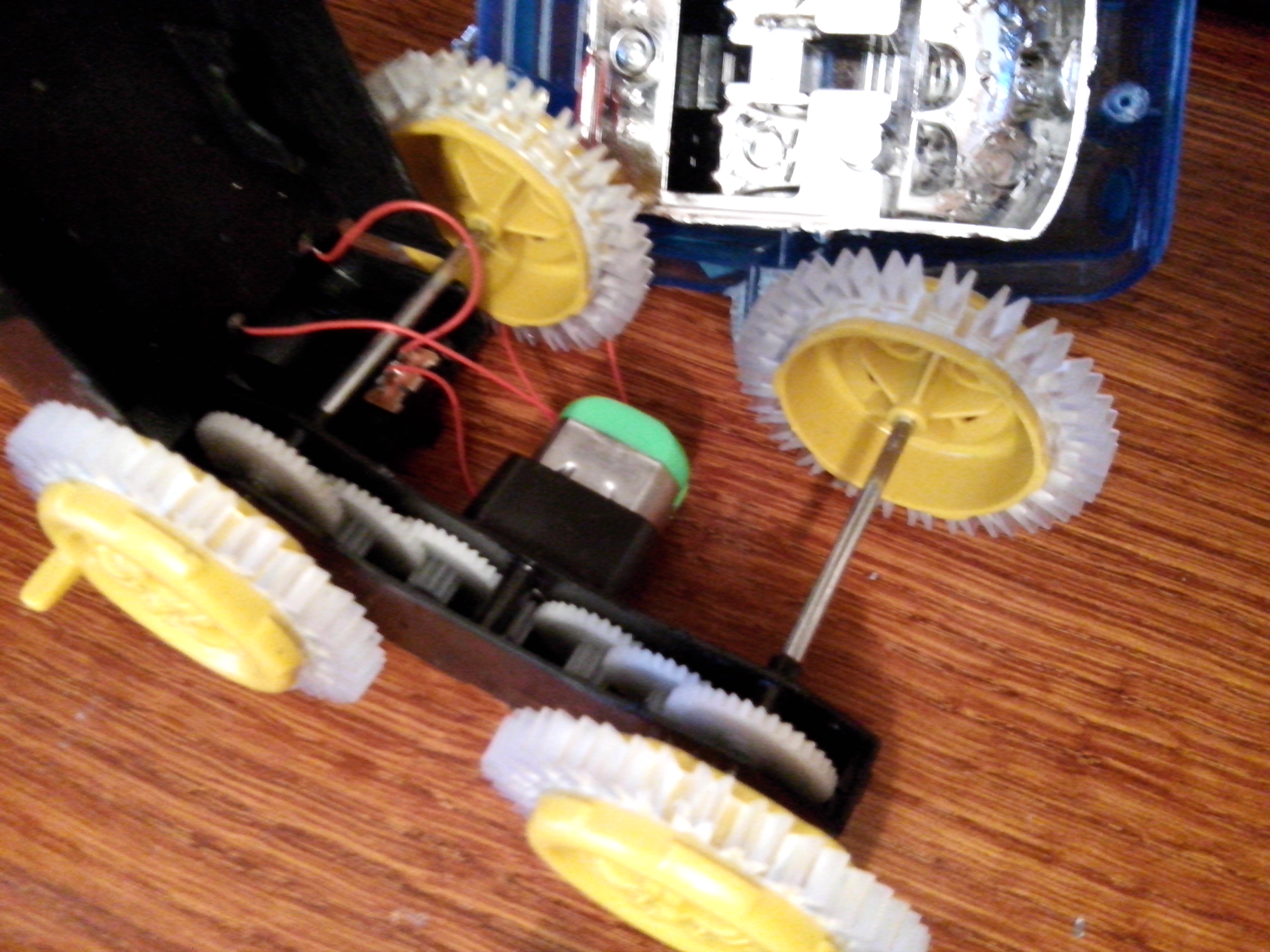
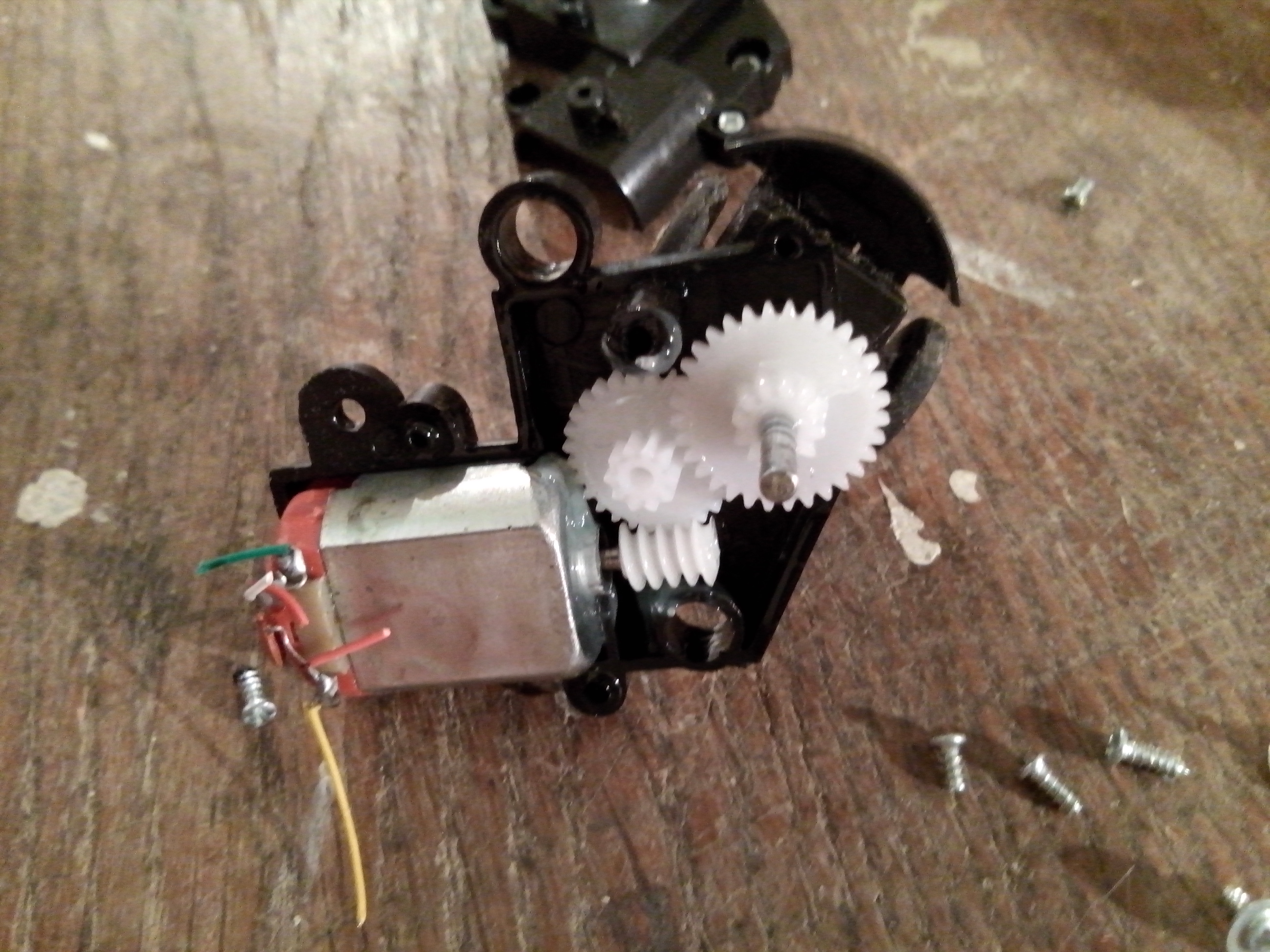
Вечером разломал коника, вынул шестерни и прикрутил к своему роботу, получилось классно! Механизм занимает минимум пространства и достаточно силён для передвижения платфомы. Пока собрал не всё, поэтому фотки будут позже. А пока вынашиваю идею как сделать новую щётку, уменьшить её диаметр до 3-4 см и заменить редуктор с шестернями на червячный.
Кстати на заметку, червяка можно вынуть и из других игрушек. Так у нас валялся поломанный слон, но в принципе это не важно, главное это механизм, который во многих игрушках (машинках, танках и других) такой же, смотрите фотки:


Ах да, забыл написать про новую турбину, она оказалась заметно производительнее всех остальных. Для лучшего прохождения воздуха я ещё добавил конус в середину турбины.
05 января 2015. Несмотря на новогодние праздники все предыдущие дни я старался как-то продвинуться в работе. Очень много информации перечитал про 3D-принтеры, если бы был такой принтер в моём арсенале, то давно уже напечатал большую часть деталей. Пока в голове строю планы на будущее как собрать 3D-принтер своими руками.
На сегодняшний день я сделал новую щётку. Взял деревянную палочку диаметром 10 мм и насверлил по спирали отверстий. В отверстия вставлял щетинки и запаивал их с обратной стороны выжигателем по дереву.

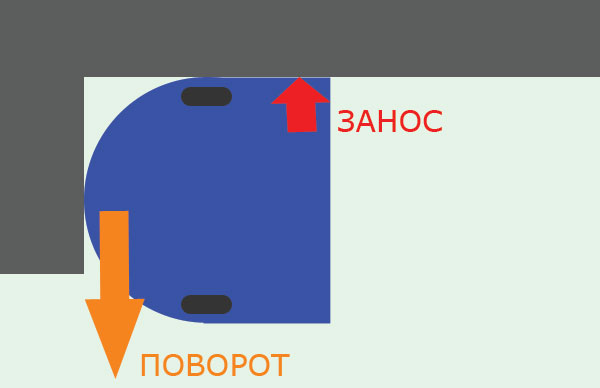
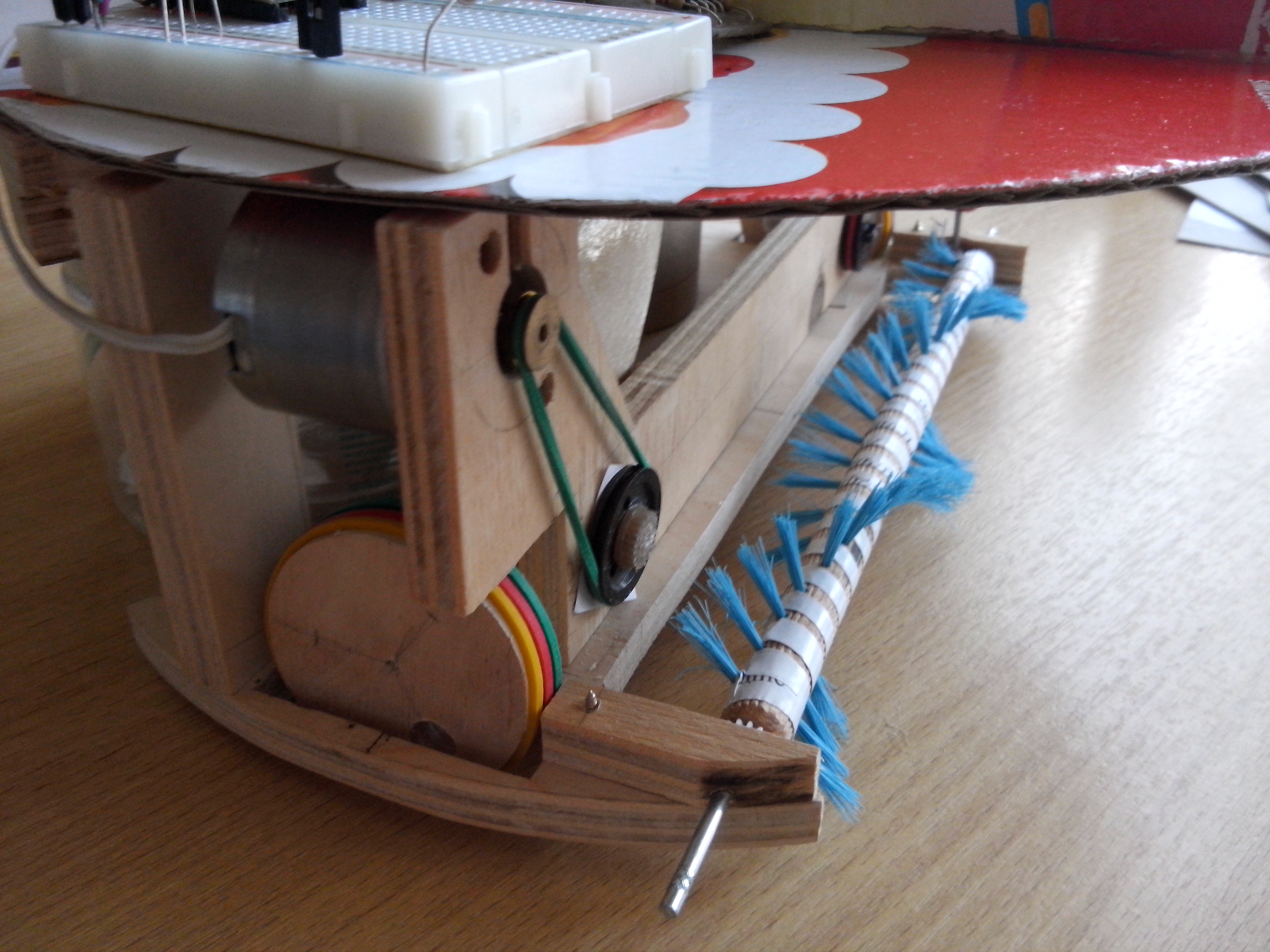
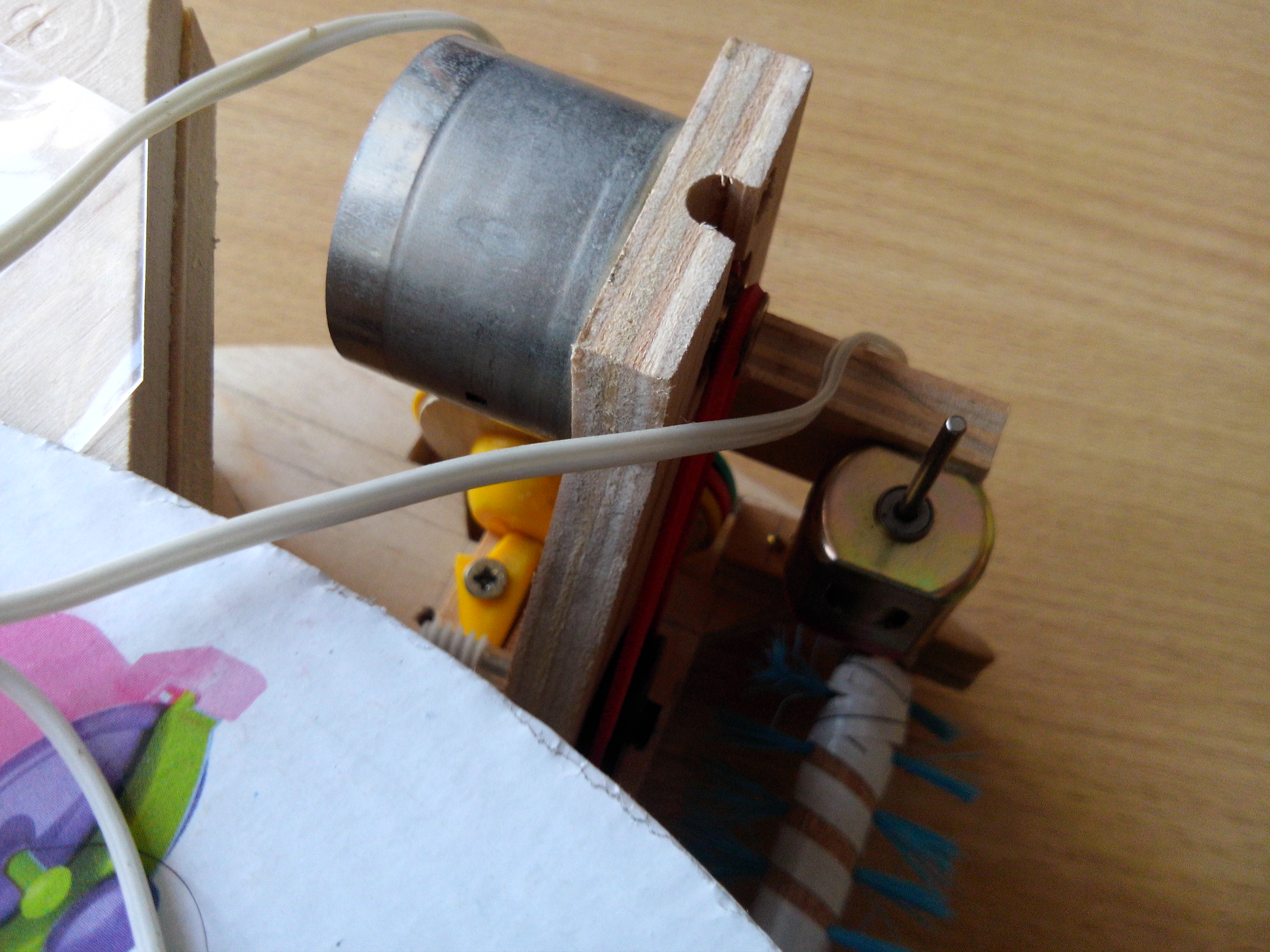
Собрал ходовую часть, пока не тестировал, сохнет клей. Новую щётку тоже поставил на место, получилось много косяков, без них никак, всё таки это мой первый робот. Кстати, я отказался от прямоугольной задней части и сделал основу под круглый корпус. Связано моё решение с переосмыслением движения робота, если представить что робот движется вдоль стены и во что-то упирается, то чтобы повернуть ему придётся сделать манёвр с движением назад, потому что квадратный зад будет заносить на стену.
Много времени я потратил на поиск решения для "зрения" робота. Механический бампер меня не очень устраивает, он портит внешний хоть и является самой простой схемой определения препятствий. Я остановился на инфракрасном датчике. Пока нет возможности собрать датчик из-за отсутствия инфракрасных фототранзисторов.
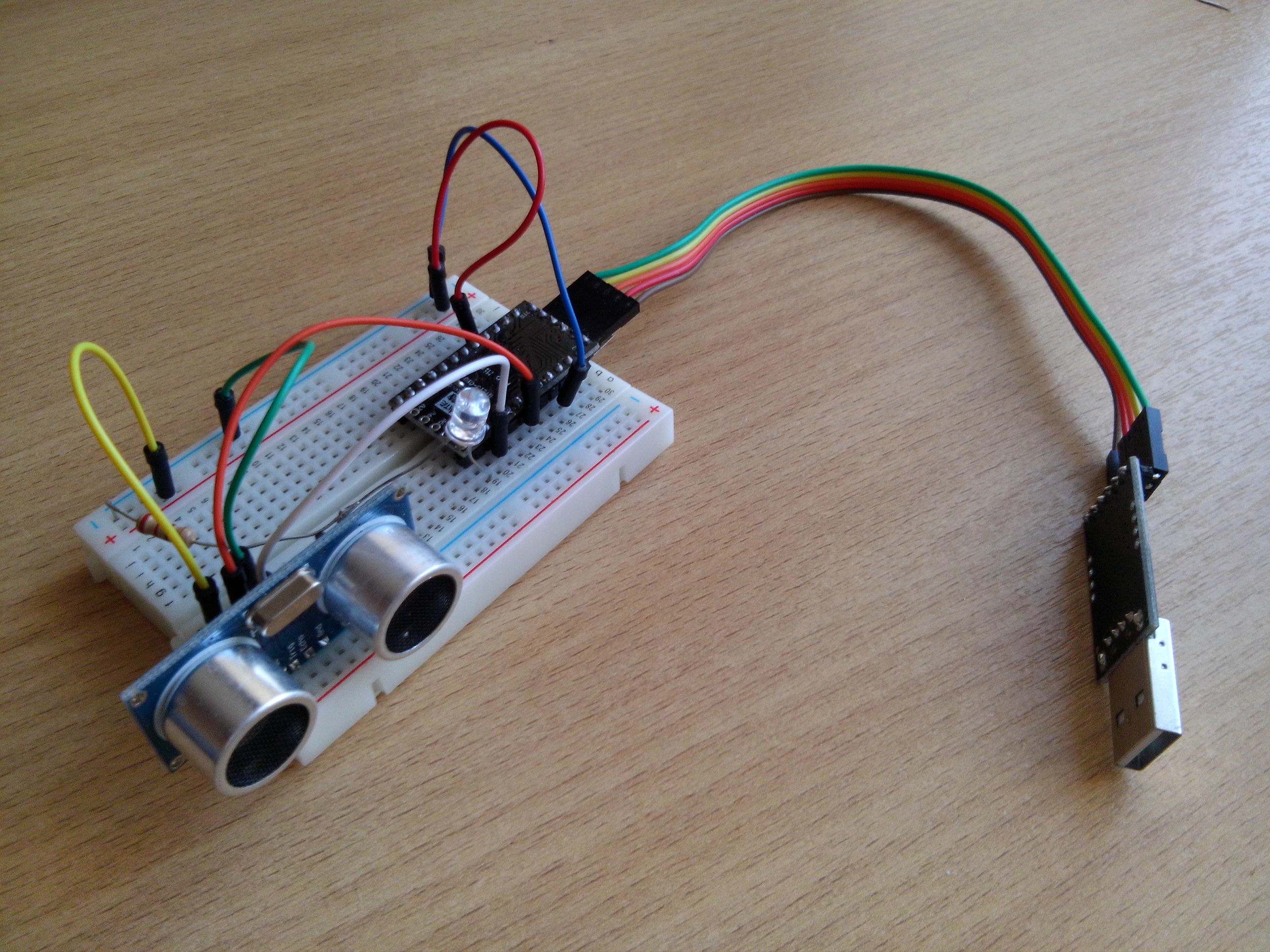
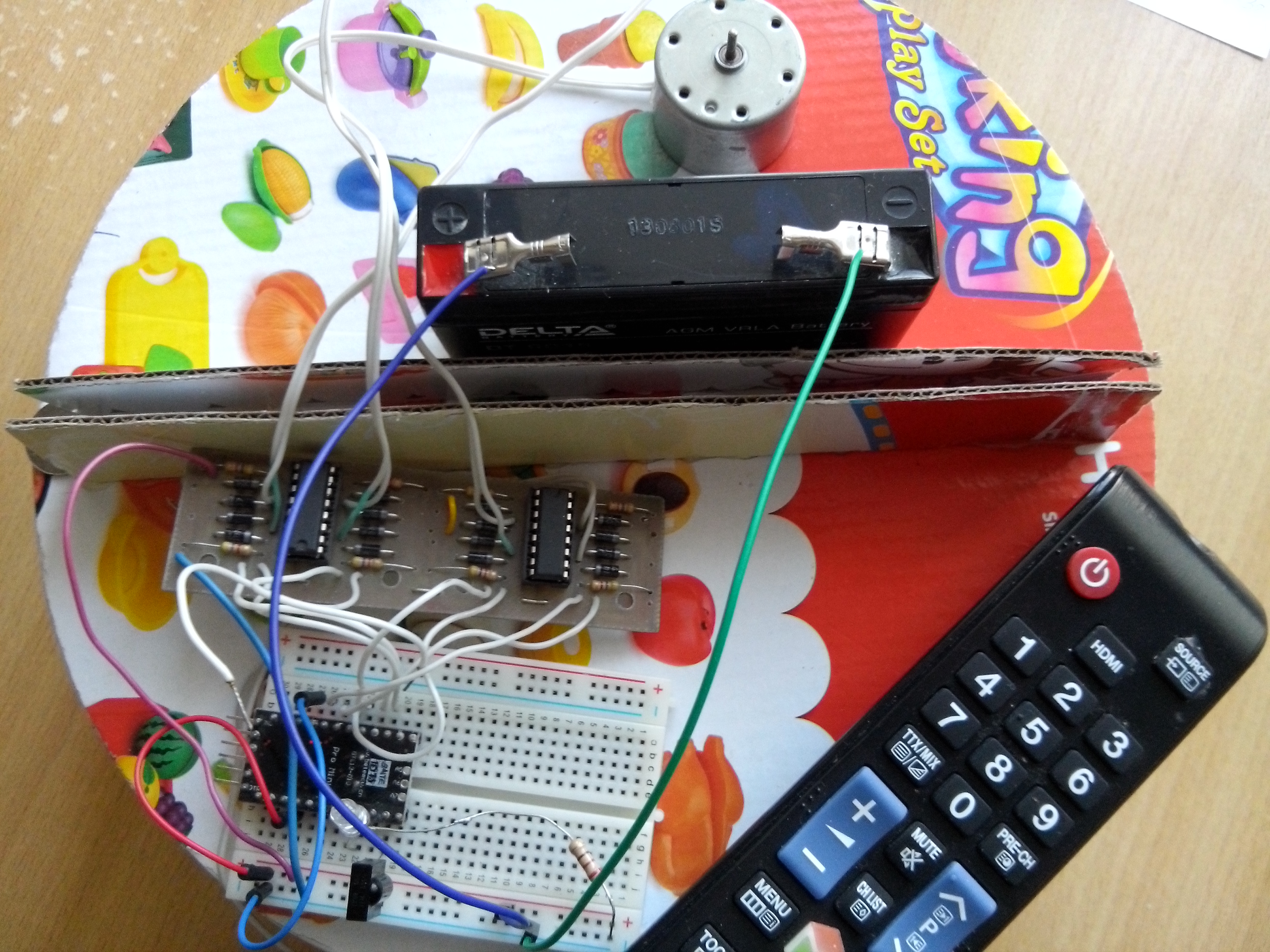
07 января 2015. Вчера до часа ночи собирал робота чтобы хоть как-то его протестировать, поиграться :) В качестве "мозга" используется плата Arduino Pro Mini + моторшилд на микросхемах L293E с обвязкой (эту плату я использовал в своём первом проекте по управлению моторами онлайн через Интернет). Управление осуществляется с пульта от телевизора. Короткое видео:
Конструкция выглядит жидко, на самом деле так и есть, почти все механизмы еле дышат. Сегодня я понял на сколько казалось бы простой робот так сложно сделать. На текущий момент почти во всех узлах у меня проблемы, требуется глобальная переделка почти всего.
Привод колёс на червячной передаче по скорости получился что надо, но его исполнение оставляет желать лучшего. Часть привода размещается в отсеке, где будет движение воздуха с мусором, это долго работать не будет. На колёсах я хотел просверлить отверстия, которые служили бы дополнительным датчиком движения. С одной стороны колеса будет располагаться ИК-светодиод, с другой ИК-фототранзистор. Эта схема при движении робота будет пульсировать, если импульсов нет, значит робот упёрся во что-то и не движется.
Для датчиков приближения я купил ИК-светодиоды и ИК-фототранзисторы, но после тестирования такого ИК-бампера стало ясно, что идея плохая. Датчик реагирует на солнечный свет, а чёрные предметы вовсе не видит. Конструкция имеет право на жизнь, но в более простых самоделках. Кому интересна схема делюсь:
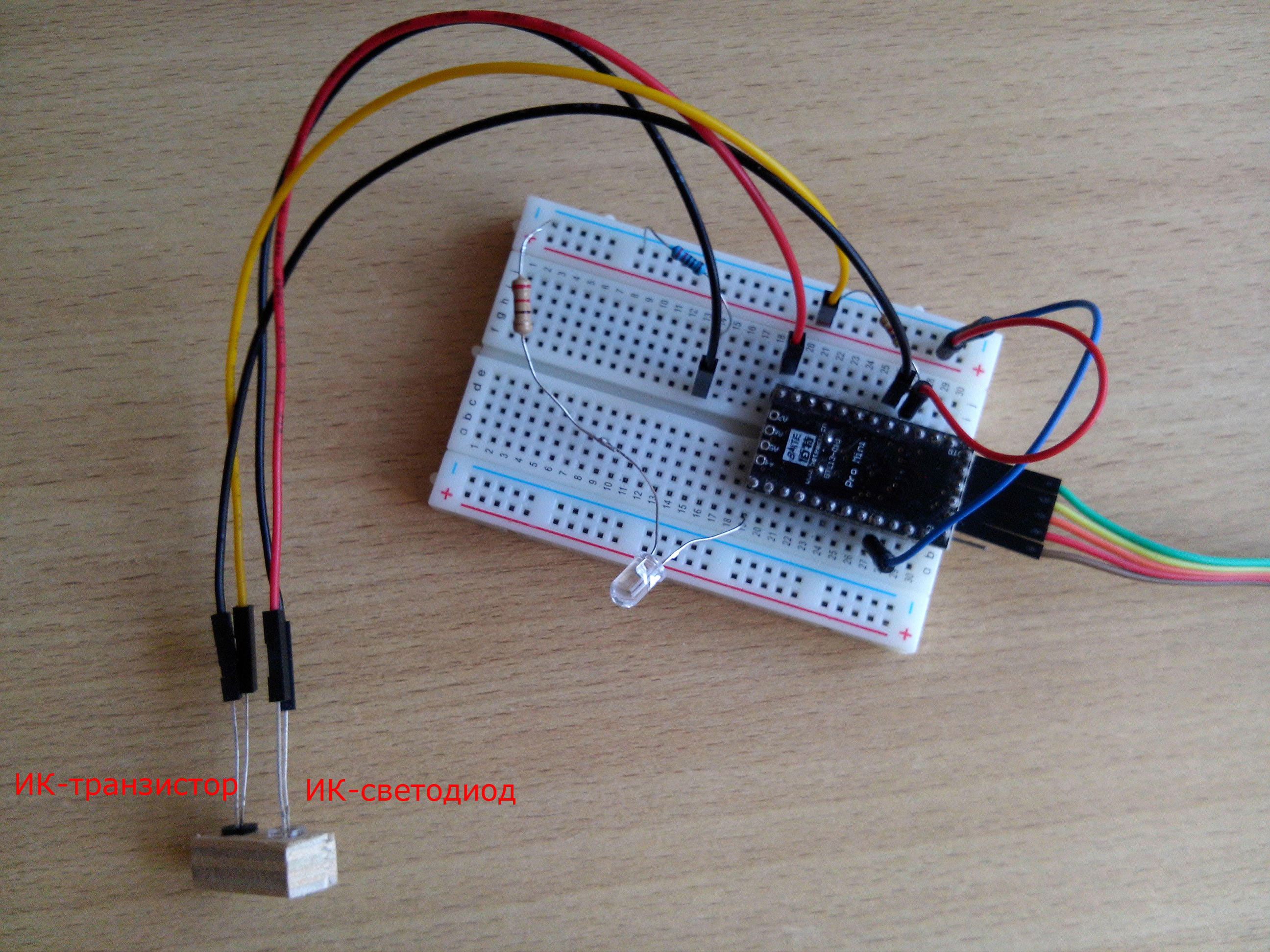
Если к датчику близко поднести руку, то на макетной плате загорается светодиод.

Также я попробовал ультразвуковой датчик. Он прекрасно измеряет расстояние, но только методом "в лоб", если плоскость объекта находится под углом, то показания искажаются. Вобщем даже с таким датчиком бампер у робота нормально работать не будет.
Скачать скетч ультразвуковой датчик расстояния
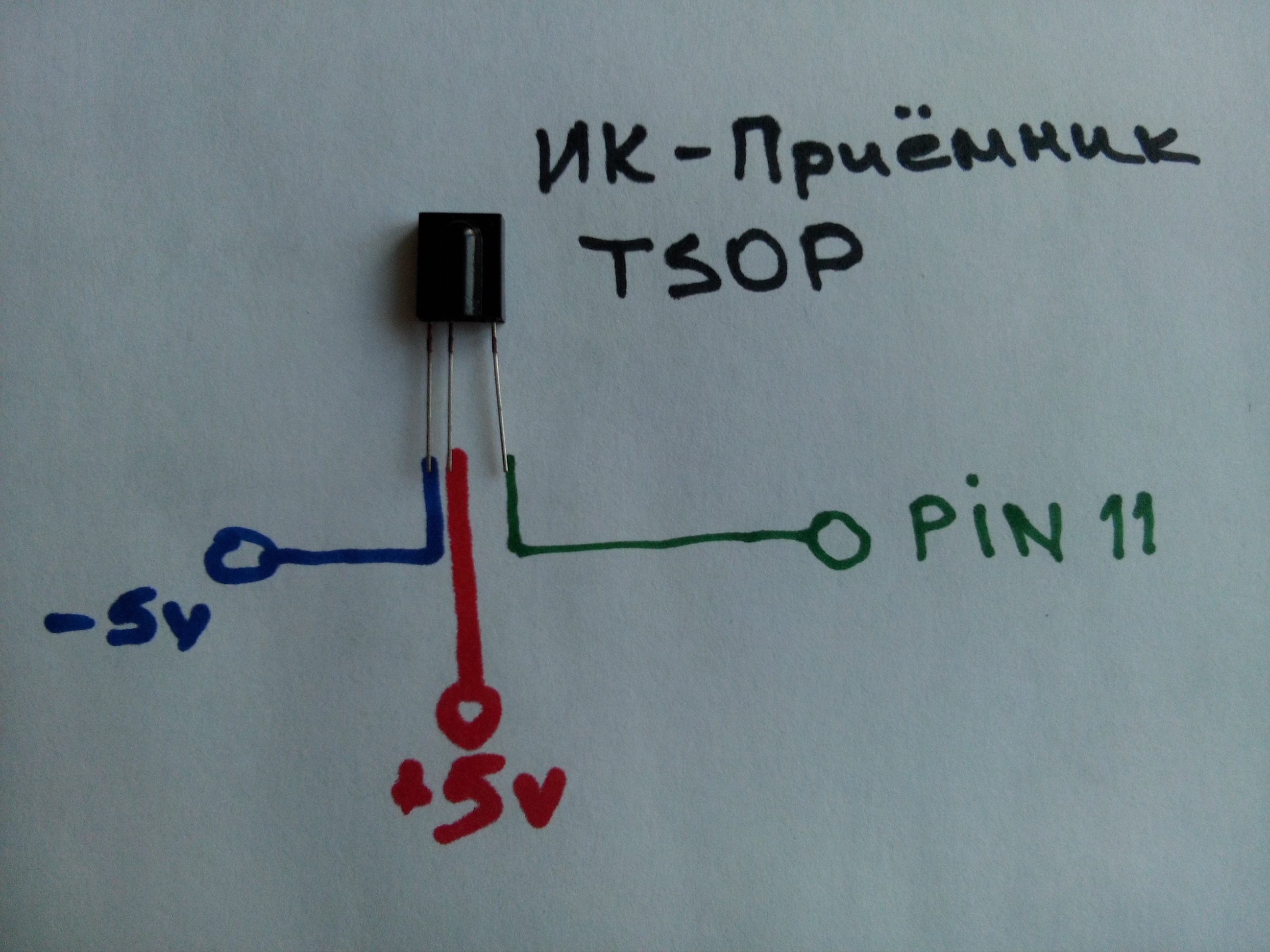
Для управления с пульта использован ИК-приёмник TSOP, какой маркировки не знаю, в принципе можно использовать любой попавшийся. Управлять можно с любого пульта, даже с мобильного телефона, но перед этим необходимо узнать коды нажимаемых кнопок на пульте. В скетче простая схема, которая отправляет код кнопки в монитор порта при нажатии на пульте. Пример подключения и скетч ниже:
Скачать скетч ИК-управление с пульта + Библиотека IRremote
Что касается щётки для подметания, получилась она отлично, ширина почти 21 см, при корпусе 25 см. Есть нюансы: ворсинки не восстанавливаются, если их примять. Приводной механизм ничем не закрыт, намотает волос за 3 минуты работы и застопорит. Щётка несъёмная. Мотор очень слабый, но количество оборотов очень даже подходящее, на столе метёт очень эффектно.
Что дальше?
Сейчас этот робот-пылесос будет разобран и переосмыслен. Скорее всего диаметр корпуса увеличится на 3 см. Изначально колёса я думал сделать на независимой подвеске, чтобы прятались если вдруг кто-то наступит на робота. Привод колёс всё таки сделаю на шестернях, вместо червяка. Ворс для щётки нужно поискать другой, более эластичный и чтобы держал свою форму. Бампер видимо придётся делать механический. Много вопросов по всасывающей турбине.
Несмотря на все недоработки робот понравился жене, а дочь вообще в восторге :)
Продолжение следует. Так часто писать про робота больше не буду, но фото и видео отчёты хотя бы раз в месяц постараюсь публиковать.
Март 2015. Купил электровеник.
Июнь 2015. Собрал ЧПУ своими руками.
Робот пылесос ещё в проекте!
Сентябрь 2017. Собираю 3д-принтер :)
Про турбины для робота-пылесоса + видео 2018 года.
Написать комментарий
КОММЕНТАРИИ
НАПИСАТЬ КОММЕНТАРИЙ
-
 В какой цвет покрасить стены и пол? Какую гамму цветов выбрать? Решить эти вопросы помогут иллюстрации из книги по цветоведению.Дмитрий ДА 22.05.2009
В какой цвет покрасить стены и пол? Какую гамму цветов выбрать? Решить эти вопросы помогут иллюстрации из книги по цветоведению.Дмитрий ДА 22.05.2009 -
 Сегодня мы расскажем о том, как сделать оригинальную поделку из бумаги – кубик оригами. Данная поделка относится к модульному оригами, потому что состоит из нескольких деталей соединенных между собой.Александра 23.04.2020
Сегодня мы расскажем о том, как сделать оригинальную поделку из бумаги – кубик оригами. Данная поделка относится к модульному оригами, потому что состоит из нескольких деталей соединенных между собой.Александра 23.04.2020 -
 В клипартах нашёл очень интересные фотографии пасхальных яиц. Тут много интересных рисунков, узоров, идей. Это первая часть фотографий, всего 100 фото я разбил на три части.Дмитрий ДА 24.08.2009
В клипартах нашёл очень интересные фотографии пасхальных яиц. Тут много интересных рисунков, узоров, идей. Это первая часть фотографий, всего 100 фото я разбил на три части.Дмитрий ДА 24.08.2009












Отличная идея! Удачи в разработке!
ОтветитьНет ли в планах начать промышленное производство(если будет работать конечно)?Мне кажется за такими штуками будущее, а конкуренции еще нет как таковой.
И еще вопрос.Можно ли эту штуку запрограммировать двигаться по определенному маршруту и по времени. может есть смысл сделать стол а-ля "завтрак в постель" :)
Молодец! Главное не бросай! Надо довести до конца. Конечно это "длясебятина" и на пром уровне не потягаться с фирмачами. Но зато такой аппарат - эксклюзив, в том и фишка. Я тоже планирую, что-то подобное соорудить, пока "запчасти" подбираю.
ОтветитьТак держать!!! Я тоже подбираю пока детали из чего буду собирать робота. Но главная щётка будет приводится приводом от китайского шуруповёрта ПРОРАБ. А вот на чем будет двигаться пока не решил. Но думаю взять две электроотвертки. Кстати как вы решили проблему помех от двигателей? Не влияют ли они на работу МК?
ОтветитьНа моторы никаких фильтров не вешал, всё работает как часы.
ОтветитьНа щетку действительно лучше вешать мотор помощнее, только вот шуруповёрт наверное перебор :)
Основная проблема это даже не мотор, а сама щётка, она обязательно должна быть съёмной.
Я отказался пока от шуруповёрта, собираю привод для щётки от двигателя принтера. двигатель через пару шестерён передаёт вращение на самодельный ремень, а ремнём на саму щётку. Щётка взята от ненужной насадки на пылесос. Турбощёткой называется. Там между щетинами есть резиновые вставки для вращения от пылесосной тяги. Редукторы на колёса с ebay называются TT Gear Motor соотношение 1:48, но пустил тоже через шестерёнчатую самодельную пару 1:2.5 Эти шестерни делал из фанеры. А рассчитывал их программой Gear Generator 3. Могу прислать фото своего шасси если интересто. Обмен опытом это всегда польза ;)
ОтветитьАлексей, фоткам буду рад.
ОтветитьСейчас ищу время чтобы собрать станок с ЧПУ, детали все есть. На станке буду вырезать запчасти для нового робота.
Думаем одинаково ))) тоже хочу ЧПУ. Но откладываю в долгий ящик. Я ещё электросамокат не полностью доделал и светодиодную люстру )) Вот для люстры и хотел ЧПУ собрать. А то мало ли будут заказы. Для себя и вручную выпилить можно, а вот делать на заказ руками не выход - очень долго. Сейчас перешлю фотки. Но предупреждаю, они с телефона (((
ОтветитьНикак не могу найти на сайте Вашей почты, уважаемый автор. Скажите мейл куда фото присылать, а то через обратную связь на сайте не нашёл как отправить.
ОтветитьРебята, очень, очень интересно и увлекательно. Зачесались руки. Дмитрий, Выкладывайте в своем отчете даже те фото, которые прислали вам товарищи. И нам интересно, и мы вам может подскажем.
ОтветитьАвтор, пожалуйста выложите чертежи последней турбины
ОтветитьЧто касается съема щетки, может поставить клипсы для пластиковых труб, а в них защелкивать щетку, щетку саму же можно сделать из той же трубы, но в местах защелкивания немного уменьшить диаметр для свободного вращения. Опять же на той же трубе можно нарезать червячную передачу. Просьба к автору, добавьте в пост свой имейл для передачи мультимедиа, в виду невозможности добавить их в комментарии.
ОтветитьОтличная идея, похвальная работа. Так же заинтересовался сбором подобного робота. Еще не планировал и не приступал, но навскидку в планах: 1) использовать пылесос для автомобиля. Дешево, почти всё готово, на моем уже есть крутящаяся щетка-насадка. Возможно будет шумновато, да и ширина щетки небольшая. Так же в китае есть ручные пылесосы для стола, ноутбука, небольшого размера. Но опять же вопрос в ширине. Может сделать щетку по типу вашей, чтобы конусом собирала к жерлу этих пылесосов. Но это пока мысли. 2) В плане электроники конечно выбор так же Arduino датчики. Но с датчиками конечно сложнее, 1-2 не обойдешься. Думаю нужна совокупность и УЗ, и механического, и ИК попробовать что-то типа режима обучения - вручную прогнать по комнате, а он запомнит алгоритм сколько куда ехать. Проблема опять же в припятствиях. Тут думать надо. 3) в качестве платформы можно взять что-то типа готовой авто платформы (smart robot car) для той же ардуины. и размеры и смотрится и готовое всё. возможно небольшие доработки потребуются.
ОтветитьА так спасибо за опыт, чтобы не натыкаться на те же грабли
Не знаю на сколько актуально, но в старых CD-приводах есть не плохая червячная передача для передвижения по направляющим считывающего лазера. Единственное она приводит в движение не шестерню как вам требуется, но можно посмотреть как ее можно применить.
ОтветитьЯ сам вряд ли заморочился бы на такую работу, ты молодец, хоть и до конца пути видимо не дошел.. )) По поводу ворса для щетки, отличная щетина, разной длины, упругости и толщины - различные кисти. Я бы наверное использовал минимальной толщины, синтетическую, они хорошо пружинят, тонкие, и есть варианты с утоньшением к концу.
ОтветитьЗдравствуйте, Дмитрий!
ОтветитьИскал альтернативу коллекторному двигателю на пылесос и наткнулся на Вашу тему про турбину на бесколлекторном моторе. Очень интересная идея применить авиамодельный двигатель для этих целей:) Я так понимаю, что с таким двигателем пылесос может работать практически сутками... Но для меня не понятно, как правильно подобрать мощность двигателя, контроллер и блок питания для работы от сети 220. Пожалуйста, посоветуйте как правильно подобрать комплект на замену коллекторнику 1200Вт?
klishe, авиамодельный я пробовал, вакуум создавало приличный. По ощущениям сила всасывания была больше, чем у родного мотора пылесоса. Использовал крыльчатку от старого пылесоса. Мотор у меня сгорел :) нужно обмотки просто перемотать. Это произошло из-за моей халатности, если всё сделать качественно, то пылесос будет хороший. Мотор я использовал бесколлекторный от своего первого ЧПУ, о нём писал тут https://modelmen.ru/p3127
ОтветитьО, то что надо) Большое спасибо! Все подробно расписано и показано.
ОтветитьНе, ну а зачем мудрить с самодельными турбинами, когда есть автомобильный пылесос?
ОтветитьДа и привод хода можно сделать на двигателях ДПМ - 25 С редуктором, в том числе и планетарным...
Обороты, я думаю, можно взять 40 - 60/мин...
Будет как раз ползучий ход, как и у всех коммунальных машин.
Да и исполнение двигателей ДПМ - приборное. Как - никак авиапром...
Михаил, если не мудрить, то можно робот-пылесос за 100$ купить :)
ОтветитьВаляется у меня в гараже новый автомобильный пылесос, совсем не сосёт, возможно такой пылесос, китайский.
Вообще цель создать такую вещь, которую можно починить легко, а не искать потом испорченную шестерёнку, которых завод больше не выпускает. Сейчас собираю 3Д-принтер, думаю что смогу печатать на нём все нужные детали.
Спасибо большое за такое огромное количество информации и 1000 раз спасибо за показанные свои косяки, это очень важно. Я тоже стартовал проектировать робот пылесос, решил, что выложу все свои чертежи в автокаде, прошивку на ардуино, чтобы такие как я могли пройти наш сложный путь по уже протоптанной тропинке!
ОтветитьМолодец!!! Умелец! Успехов в дальнейших разработках!!
Ответитьздорово!!!!
ОтветитьМолодец, спасибо за идею!
ОтветитьМужчинам в возрасте хорошая зарядка мозгов для занятий дома. Муж у меня инженер с хорошим образованием, но лень после 70 захватывает мужчин молниеносно. Попробую заинтересовать, ещё раз спасибо!